Overview
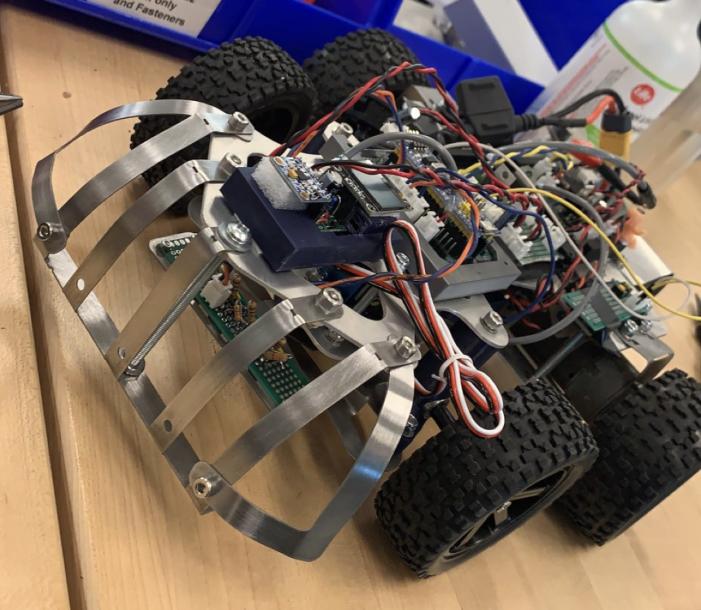
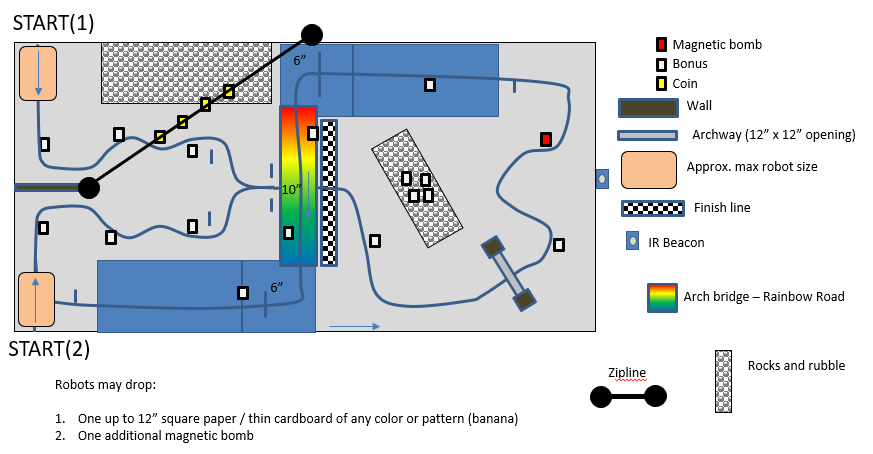
This summer, student teams in my engineering program created an autonomous robot from scratch for a Mario Kart themed competition, featuring taped racing lines, mystery boxes, and an infrared beacon shortcut. The objective was to obtain as many points from laps (3 points each) and bonus boxes (1 point each). My group settled on a purely lap strategy centered around jumping off a ramp as a shortcut, a high risk-reward approach.
Design
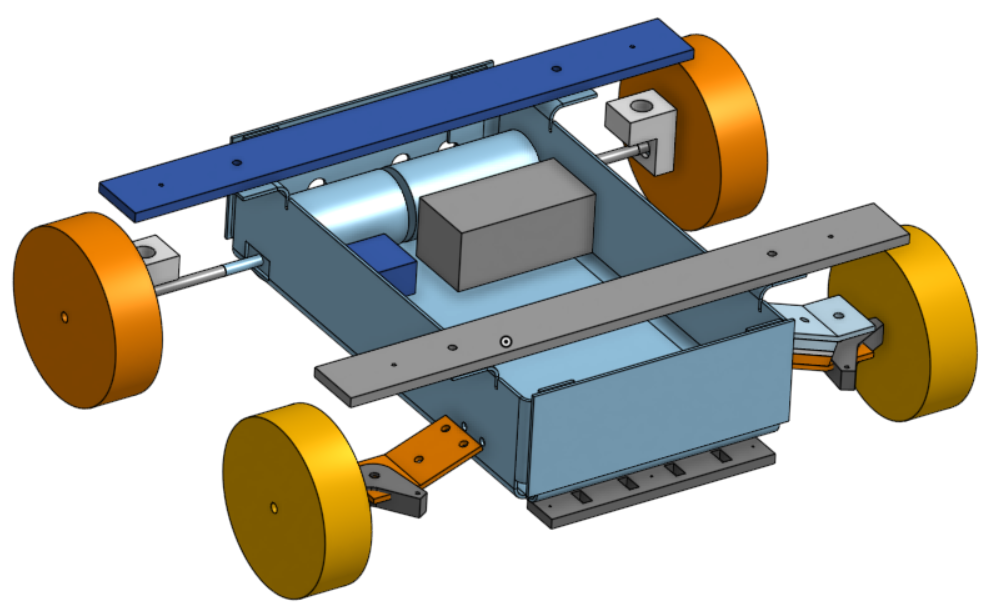
- Modelled rev. 1 steel sheet metal robot chassis with suspension, later manufactured on the waterjet
- Lathed and milled steering knuckles for prototyping, helped debug electronics and solder up boards
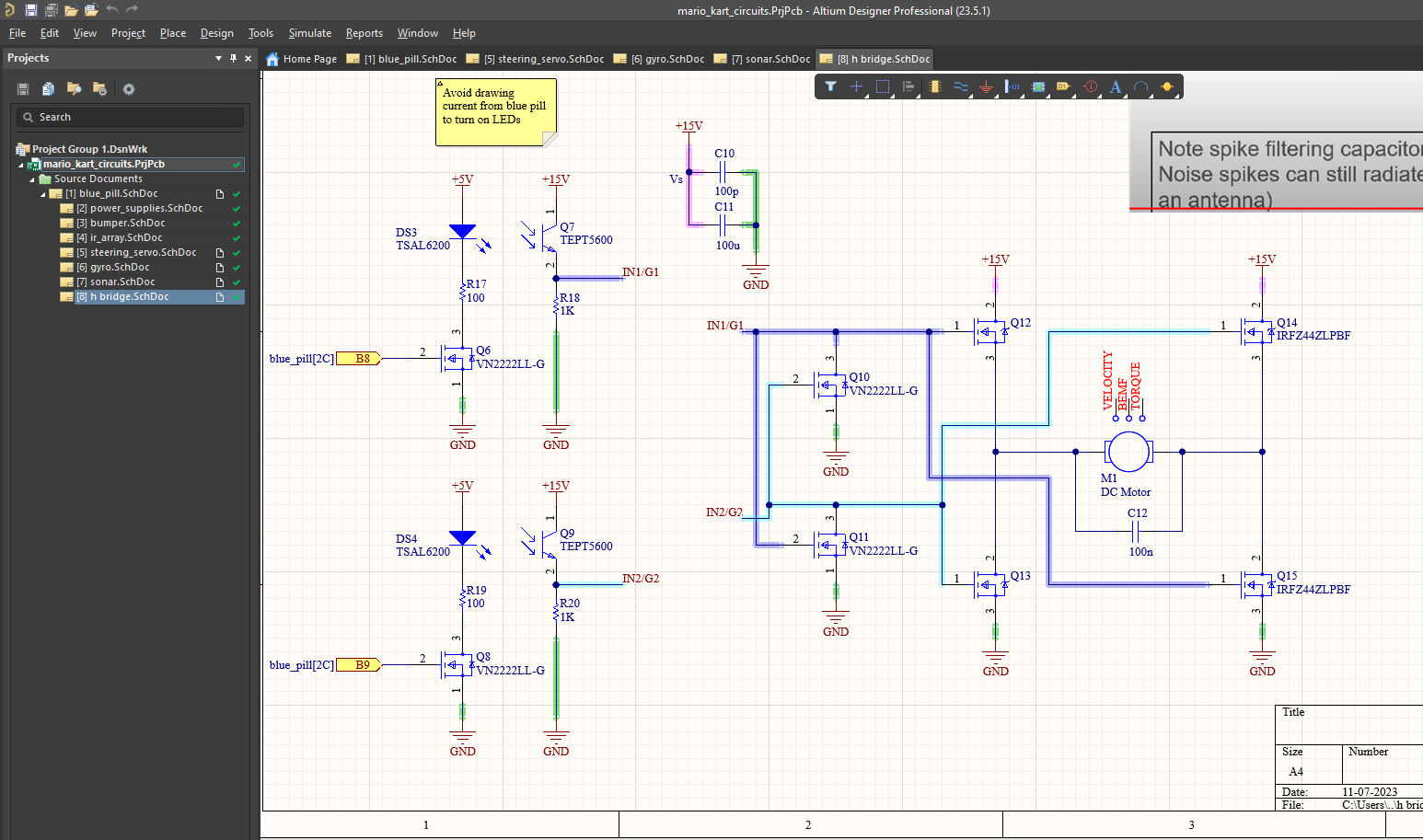
- Designed all the sensor and actuation systems (IR tape sensors, IMU gyro navigation, steering servos) and power distribution
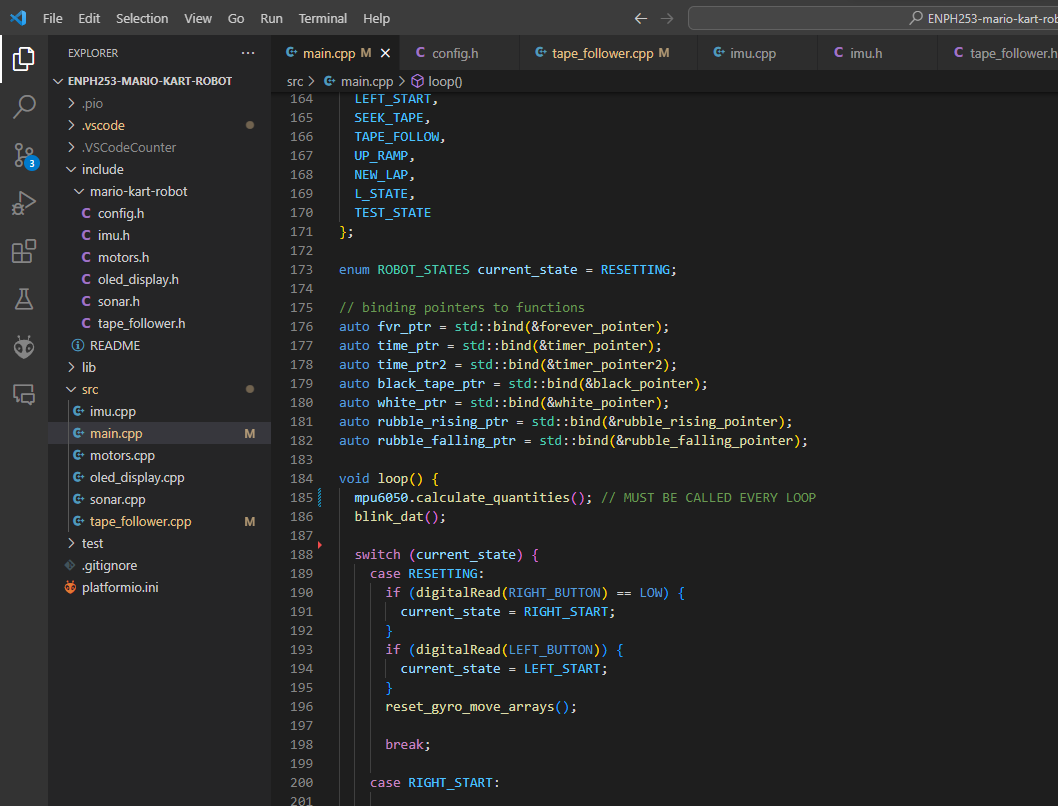
- Did majority of microcontroller programming, including steering and gyro PID and high level "state machine"
Results
- Final robot was one of two able to jump off a ramp as a racing shortcut in competition
- Robot successfully completed 3 laps against other robots in competition